Berikut langkah untuk backup data program dan parameter Mitsubisi Robot :



2. Koneksi kabel Usb ke Robot











Baca Selengkapnya >>>
1.
Buka Program RT-Toolbox2 lalu buat New project
=> Pilih Folder tujuan penyimpanan data program dan
Tulis nama projectnya



2. Koneksi kabel Usb ke Robot

3.
Click button [ ONLINE ]
Sampai
koneksi berjalan normal

4.
Tekan button [ BACKUP ] lalu klik kanan dan klik
button [ ALL ] =>



5.
Klik fore case maintenance untuk mengetahui
schedule maintenance


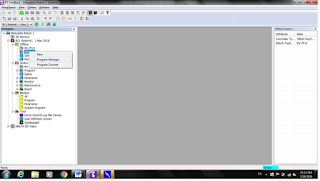
6. Back
up file program offline dengan klik kanan program => program manager

7.
Pilih semua dengan blok semua program robot
=> tekan copy

8.
Buat parameter offline dengan klik kanan
paremeter => copy from the backup


Hasil Backup prameter

Selamat Belajar dan Mencoba !!!




































